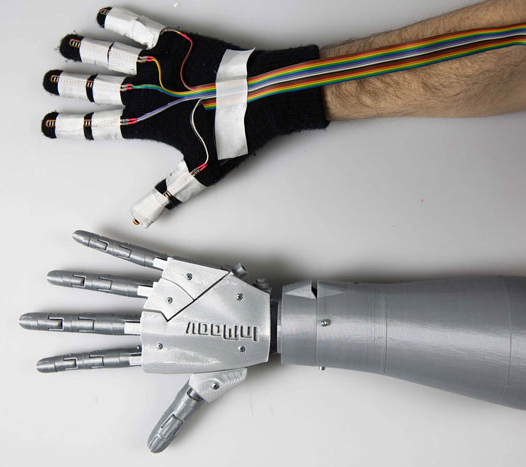
The flex sensors built into the glove enable the user to control the robot hand in real time, to control the robot hand, which is connected via WiFi. You simply move your fingers and the hand moves its.
For the User Research course, we decided to study the muscle currents on the forearm and to use them to derive the movements of the hand and represent them in a model.
During our research, we found that many of the existing sensors on the market were not sensitive enough for our idea. While most could read when the hand was clenched tightly into a fist, the sensors did not register a deflection when the hand was slowly closed, not to mention when only the fingers were moved. So we decided to use more sensitive flex sensors for our project. We stitched these to the fingers of a glove to be able to detect the exact movements of our users.
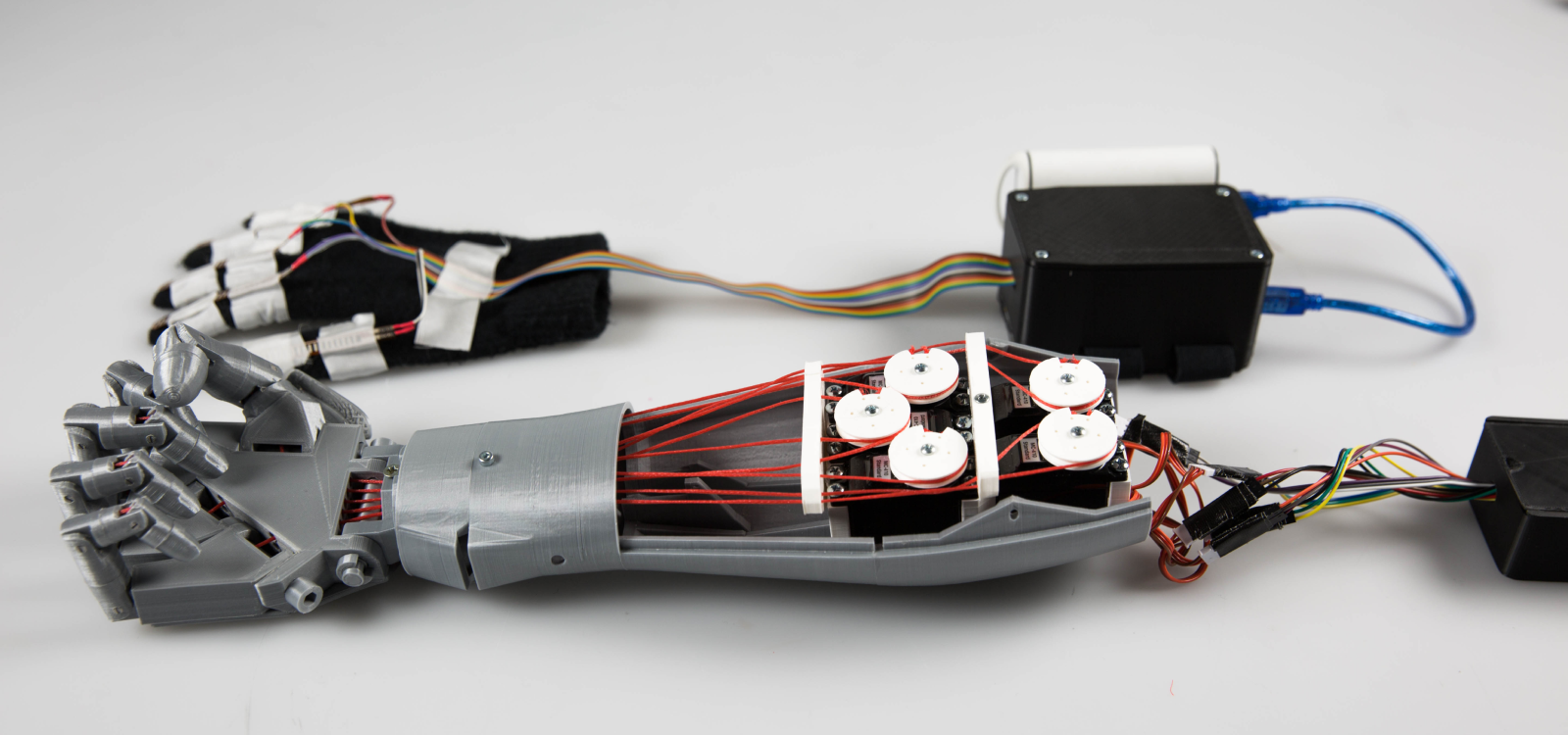
The variable resistance of the flex sensors is converted into a range of 0 to 90 degrees for the control of the servo motors in the robot arm.
Both the control of the robot hand and the collection of the glove's measured data are handled by WiFi-enabled microcontrollers. These communicate via UDP to enable the fastest possible data exchange. This allowed us to achieve a latency of just 20ms under optimal conditions without any problems.
The power supply of the glove's microcontroller is solved with a powerbank, which can provide enough energy for several days. This ensures the user complete freedom of movement.

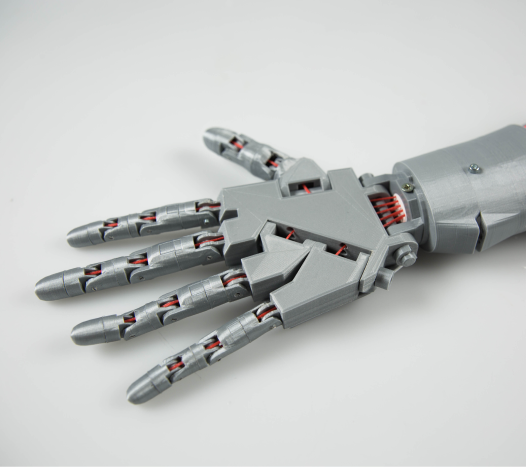
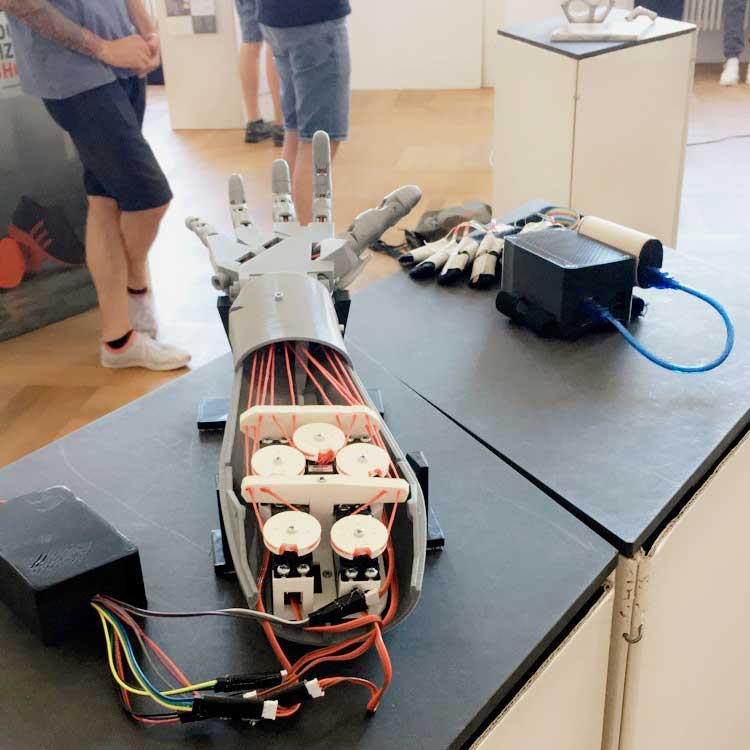
The model of the hand comes from the open source project InMoov. It was 3D printed in individual parts and then assembled with screws.
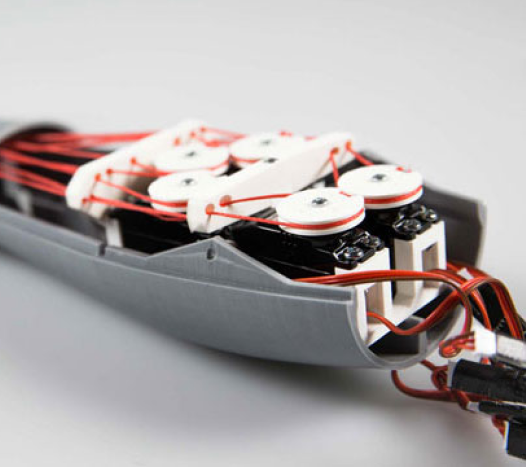
The movement of the fingers is achieved with two ropes each, which act as a kind of tendon. They simulate flexors and extensors of the human body. In the model, the ropes are attached to the rotating servo motors with the help of pulleys, which allows the ropes to rotate and the fingers attached to their ends to be flexed or extended.
User Research
Semester 3
WS 2016/2017
Conception
Prototyping